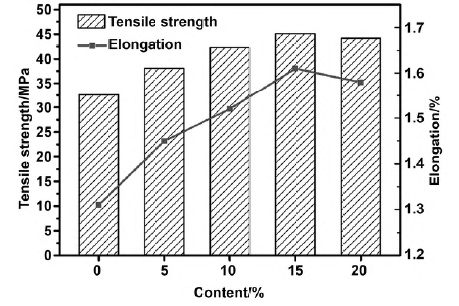
摘要:装配式建筑钢结构具有节能、环保、资源可循环利用的特点,符合我国未来建筑发展方向。但普通钢材易受腐蚀,钢材表面防腐是目前钢结构设计中必须考虑的内容。由于防腐作业成本高,并且除锈产生粉尘,涂料有机化学物质、镀层金属对大气及土壤产生污染,是制约建筑钢结构发展的重要因素。故开发免涂装新型钢材,降低加工成本,减少环境污染,对于建筑钢结构发展具有重大意义。为此,在钢中添加Ni、Cr、Cu合金元素满足材料耐大气腐蚀性能要求,结合型钢轧制工艺特点,采用V 微合金化,轧后冷却过程中V(C,N) 弥散析出强化,研发了Q390级抗震耐候热轧H型钢(Q390NHD) ,采用周浸对比试验研究了其耐蚀性,分析了在大气中长期暴露的腐蚀问题,论证了耐候钢作为装配式建筑钢结构材料的可行性。Q390NHD级型钢的主要化学成分范围:m(C)≤0.12%,m(Si)≤0.50%,m(Mn)≤1. 50%,0.20%≤m(Ni)≤0.65%,0.30%≤m(Cr)≤1.25%,0.20%≤m(Cu) ≤0.55%,m(V) ≤0.12%;力学性能:下屈服强度ReL在400MPa以上,抗拉强度Rm在560~600MPa 之间,屈强比不大于0.80,短比例试样断后伸长率不小于25%,-20℃夏比冲击功不小于34 J/cm2 ,满足GB 50017-2017《钢结构设计标准》中采用抗震性能化设计的钢结构构件材料性能要求。72h周浸试验中,Q390NHD钢的腐蚀速率为1. 665g/(m2·h) ,是普碳钢的47.0%,其耐蚀性是普通钢的2倍多,与09CuPCrNiA 相当。参照ISO 11844-1∶2006 标准分析,Q390NHD 型钢70 a的腐蚀厚度,若按照室内腐蚀性IC3级给出的腐蚀速率上限估算,总腐蚀量不超过0.031 mm;达到IC4 级时,不超过0.3 mm;即使室内最严重腐蚀情况(IC5级) ,也不超过0.7mm。因此,只要适当增加腐蚀裕量,在我国大部分地区,将Q390NHD钢应用于普通民用办公及住宅钢结构建筑中是可以免涂装的。
建筑
2024年01月08日
0 点赞
0 评论
247 浏览