铁基非晶合金和13Cr不锈钢在超临界CO2环境的腐蚀行为
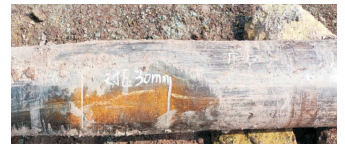
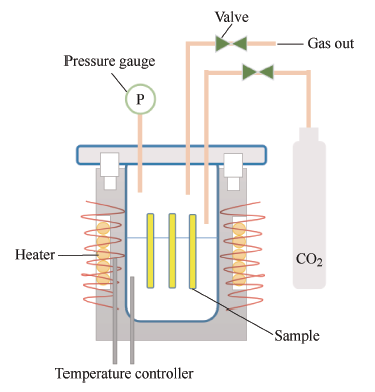
摘要:非晶合金由于其独特的结构、优异的耐磨耐蚀性能在海洋及CO2地质封存领域展现出广阔的应用前景,有望成为超临界CO2环境下钢构件的耐蚀涂层材料,但关于非晶合金在该环境下的腐蚀行为鲜有报道。利用高温高压反应釜对SAM2X5铁基非晶合金与13Cr马氏体不锈钢在温度80℃,压力10 MPa的模拟环境下进行腐蚀行为对比研究。通过XRD、DSC、CLSM、SEM、XPS以及电化学Mott-Schottky 测试等方法对两种材料的微观结构、腐蚀形貌以及表面膜成分及结构进行表征与分析。研究结果表明:在高温高压的超临界CO2环境下进行168 h腐蚀试验后,13Cr不锈钢表面发生严重的点蚀,而铁基非晶合金表面无点蚀发生;非晶合金表面膜除Fe和Cr外,富含大量的Si元素,会促进形成稳定致密的钝化膜;13Cr不锈钢表面膜为p型半导体,非晶合金表面膜为n型半导体,13Cr不锈钢钝化膜载流子密度远高于铁基非晶合金。证实了在该环境下铁基非晶合金的耐蚀性能远优于13Cr不锈钢。