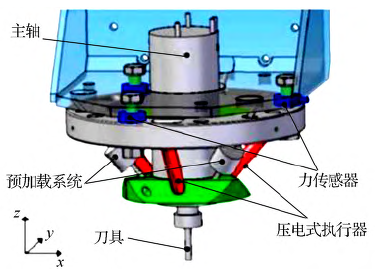
智能主轴技术发展综述 摘要: 主轴作为数控机床的核心部件,其智能化是未来的重点发展方向。对智能主轴的概念和发展现状进行了概括,并对目前智能主轴的相关研究进展进行了较全面的综述,描述了智能主轴的特点和未来发展方向,详细阐述了智能主轴的状态监测、多源信息融合以及状态决策和主动调控这3 大功能,论述了智能主轴的发展局限性和面临的挑战,认为自顶向下设计、智能传感器和执行器、实时数据处理和决策、以预测为中心的控制和维护等潜在技术将进一步推动智能主轴的发展。 机械 2024年07月18日 1 点赞 0 评论 403 浏览
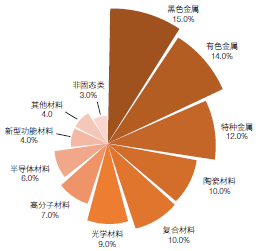
超精密装备中的材料科学和技术 摘要:超精密装备的技术进步高度依赖高性能材料的发展,关键材料的制备和加工工艺直接影响超精密装备的综合性能水平及其使役行为,而高性能材料短板已成为我国高端装备制造的一个主要薄弱环节。文章系统总结了超精密装备中主要材料的应用情况,对超精密装备中高性能材料制备与加工技术的发展现状进行了综述,并对相关领域未来的发展方向提出展望。文章在深入分析当前我国超精密装备材料领域面临的主要问题基础上,结合实际情况分别从技术层面和政策层面提出了解决办法和发展思路,以期助力实现各类先进材料与制造科技的深度融合,进而推进超精密装备制造技术的优化升级和提高相关产业竞争力。 机械 2026年02月04日 1 点赞 0 评论 118 浏览
加工钛合金用硬质合金铣刀的研究进展及现状 摘要:本文综述了近年来应用于钛合金加工领域的硬质合金铣刀的研究进展与现状。钛合金因其优异的机械性能和耐腐蚀性,在航空航天、生物医疗等领域得到广泛应用,但其加工难度大,对刀具材料及结构提出了更高要求。硬质合金作为主流切削工具材料,可以通过刀具结构设计、涂层技术以及参数选择等方面的发展,显著提升刀具寿命和加工效率。未来,硬质合金铣刀的发展将更加注重复合材料的应用和智能刀具的设计,以适应更复杂的工作环境和更高的生产效率需求。 机械 2026年06月01日 1 点赞 0 评论 66 浏览
机器人在管道提升式深海采矿系统中智能化的挑战与发展趋势 摘要:近年来对深海矿物资源的开采需求逐步增大,为了解决传统的管道提升式采矿系统的缺陷,提出将智能化机器人引入来实现高效、精准的矿物采集和结构物的健康监测。但由于深海环境复杂,与陆地上机器人相比,水下机器人的设计需要考虑海洋带来的阻力、噪声等多方面的影响。从水动力学、水下定位和水下视觉3个方面介绍了管道提升式深海采矿系统中采矿机器人的发展与技术难点,概述了机器人管道检测技术。探讨了深海资源开采水下机器人的技术发展方向。 机械 2025年01月24日 1 点赞 0 评论 365 浏览
基于智能制造的焊接材料新特征 摘要:制造业是国民经济的主要支柱,是工业提质增效转型升级的主力军。当前世界制造业正在向智能制造转变,各工业强国纷纷投入新工业革命的竞争当中,美国提出了“ 美国先进制造业国家战略计划” ,德国提出了“ 工业4.0计划” ,日本提出了“ 智能制造系统” ,国内在实施制造强国战略方面也提出了促进制造业创新发展,明确智能制造的主攻方向,助推智能制造一体化向高端化迈进的长远规划。焊接技术是制造业不可或缺的重要手段,智能焊接技术更是智能制造的重要主攻方向,已成为促进产业优化与提升“ 智造” 水平的关键因素。基于智能制造大背景下,不断涌现出新型的智能焊接技术,但其发展始终需要以焊接材料作为支撑,尤其是在智能制造背景下,焊接材料的研制面临着新的需求和挑战,只有不断提升焊接材料品质,赋予焊接材料新的特征,才能实现智能制造下优质高效焊接技术的不断发展和应用。面向全球智能制造发展浪潮,本文讨论了智能制造背景下焊接自动化与智能化的发展现状,梳理了焊接场景与焊接材料的匹配关系,归纳了新一代焊接材料应具备的特质,提出了焊材质量评价的新要素,总结了新时代浪潮下焊材制造技术所面临的新挑战,并对未来焊接材料的发展提出展望。 机械 2024年05月23日 1 点赞 0 评论 183 浏览
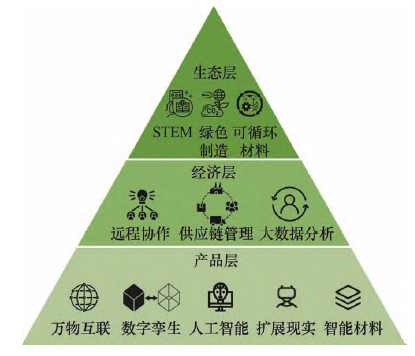
面向工业5.0 的人机协作增材制造 摘要:工业5.0 是一种以价值驱动的新兴制造模式,其中人本智造是核心理念之一。然而,目前人本智造研究主要聚焦于系统层级,针对增材制造等特定工艺应用的研究仍然较少,因此亟需明晰相关科学问题与关键挑战。基于人-信息-物理系统的理论体系,提出了面向工业5.0 的人机协作增材制造参考框架,建立产品-经济-生态三层次模型,并结合增材制造技术的内在特点和功能演进阐释了人机协作增材制造的基本概念。围绕产品开发流程,讨论了关键使能技术,包括万物互联、人工智能、数字孪生、扩展现实、智能材料等。最后,探讨了人机协作增材制造在产品层、经济层、生态层中的典型应用,包括个性化产品设计、交互式制造、面向工艺链的人机协作、众创式设计、分布式制造和节能减排等。该框架旨在研究人机协作增材制造,通过发展人-信息-物理系统理论,首次系统地阐述了其核心概念、关键技术和典型场景,以推动增材制造向人机协作的工业5.0 范式转变,更好地满足用户个性化需求。 机械 2024年12月02日 1 点赞 0 评论 279 浏览
机械结构概率疲劳研究:现状及展望 摘要:疲劳是循环载荷作用下机械结构最常见的失效模式之一。受源自材料、载荷、尺寸等方面的多源不确定性因素影响,疲劳损伤演化往往呈现不容忽视的分散特征。尤其,当计算对输入的细微变化极其敏感时,参数在合理范围波动所导致的疲劳寿命差异可达千倍。此时,传统确定性模型耦合安全/分散系数的设计准则不再适用,亟待发展可有效量化描述疲劳行为分散性的概率模型,以面向现代结构工程领域基于可靠性的最优化设计发展趋势,满足设计冗余度检测以及检修周期、维护间隔及除役条件确定等需求。为促进概率疲劳研究发展、凸显其在疲劳可靠性设计中的重要性,概述了概率疲劳研究背景、疲劳分散性来源、疲劳行为分散特征、疲劳可靠性等基本要素及该方向研究前沿,最后结合全文内容作出总结。 机械 2026年03月26日 1 点赞 0 评论 136 浏览
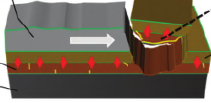
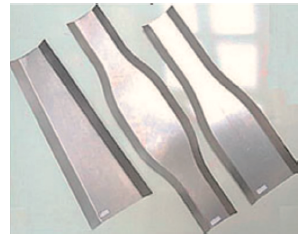
智能辊压成形装备(系统)及其应用案例分析 摘要: 辊压成形是一种通过顺序排布的成形模具渐近横向弯曲金属带材和板材的塑性加工工艺。由于其低成本、高效率、柔性化的特点,已成为中国新能源、航空航天、轨道交通等多个领域实现轻量化、节能、减排和安全性提升的重要技术之一。但是,该工艺的工序复杂性和离散性、材料厚向性能的不均匀性、设备信息化和柔性化自动化的低水平等问题,导致了它类似于“黑匣子”,使得产品质量难以预测,调试生产高度依赖人工经验,可成形截面受限,成品率不稳定。为此,本文提出了一种数据驱动的智能辊压成形装备(系统),并介绍了该装备(系统)的技术架构和特点。通过搭建基于人工智能的数据架构,该系统将传统辊压成形中的离散数据进行采集、筛选、集成、储存和分析。同时融合数字孪生、人工智能、轮廓检测技术和多智能体协同控制等来构建可以替代人工经验的自纠偏的生产模式。针对新能源汽车行业,本文给出了利用该系统解决的一个辊压成形的动力电池包结构件的回弹控制案例,并对该系统的发展给出了建议和展望。 机械 2024年10月12日 1 点赞 0 评论 318 浏览
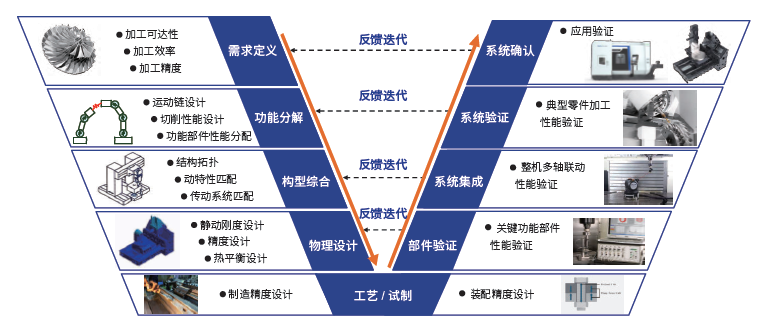
高端数控机床正向设计方法发展研究及建议 摘要:文章阐述了高端数控机床正向设计理论、方法和技术体系对实现我国面向重点领域用户需求的高端数控机床自主研发、维护国家关键核心技术自主可控的重要战略意义;提出了贯穿于设计、加工、装配过程,面向机床末端空间位姿误差/相对动柔度特性约束的整机静动刚度、几何精度、热平衡、装配工艺过程精度等正向设计方法和关键科学问题;论述了国际领先研究机构在机床正向设计领域的研究进展,提出了发展和提升我国高端数控机床正向设计技术水平的政策建议。 机械 2026年02月04日 1 点赞 0 评论 184 浏览
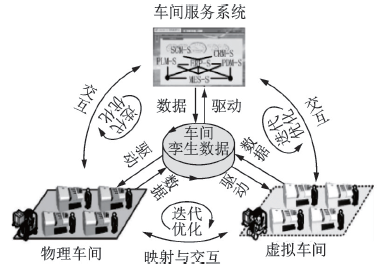
基于数字孪生的热处理智能化技术研究进展 摘要: 为减少热处理智能化技术数据孤岛的状态,数字孪生的运用被广泛关注。数字孪生技术是智能化制造领域的先进智能技术,也是解决数据孤岛的重要方法之一。本文介绍了数字孪生技术与基于数字孪生的热处理研究现状。以车间数字孪生框架为基础,从物理车间、虚拟车间、车间服务系统、孪生数据4 个方面介绍数字孪生的研究现状,分析了各部分中存在的主要问题。针对基于数字孪生为基础的热处理技术,结合传统热处理技术与特殊热处理的智能化研究进展,分析数字孪生技术在热处理中的应用与进展。 机械 2024年10月14日 1 点赞 0 评论 518 浏览