我国电加工机床行业的发展与装备应用趋势 摘要:电加工机床是工业母机的重要组成部分,其技术及装备的发展与应用对我国制造业发展发挥积极的重要作用。基于2024 年度我国电加工机床行业重点企业的统计数据,分析了我国电加工机床行业的发展和装备应用情况, 重点介绍了2024 年电加工机床行业的总体经营情况和出口情况;通过近四年的分季度销售情况对比,分析了2024 年的市场变化与特点;通过各类电加工机床的销售量和销售额占比解析了市场需求,并展望了发展趋势。 机械 2026年02月02日 1 点赞 0 评论 109 浏览
激光熔覆耐磨铁基合金涂层研究现状 摘要:磨损失效作为机械部件的主要失效形式之一,会造成巨大的能源消耗和材料损失。激光熔覆技术作为我国重点发展的再制造技术之一,具有修复效率高、性能优异、绿色环保的特点。综合考虑熔覆层与基体材料的热膨胀系数、熔点及润湿性等匹配性因素,铁基合金成为激光熔覆再制造的主要合金材料之一。结合国内外最新相关研究成果,从合金成分、外加强化相、激光熔覆工艺参数(激光功率、扫描速率、送粉率)等方面对激光熔覆铁基合金耐磨性能的影响进行了综述,系统讨论了合金成分、外加强化相、激光熔覆工艺参数对铁基熔覆层耐磨性能的影响机理,并介绍了铁基熔覆层的磨损失效机理。最后对激光熔覆高耐磨铁基合金涂层的未来发展方向进行了展望。 机械 2026年05月26日 1 点赞 0 评论 92 浏览
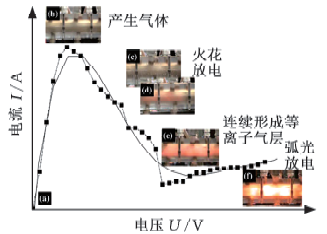
电解铣削加工技术研究进展及展望 摘要:电解铣削加工技术具有加工柔性好、工具电极无损耗及与待加工材料力学性能无关等特点,在高效、精密加工难切削加工材料制作的复杂结构方面具有重要的应用前景,成为电解加工技术研究的热点。详细介绍了国内外研究者在电解铣削的材料去除机制、加工过程建模及加工工艺等方面的研究进展,发现目前距离该技术的规模化工程应用仍有加工精度、表面质量及加工效率等方面的诸多挑战,需在加工过程中就精确建模、提高加工效率、创新复杂型面加工工艺及复合加工方法等取得突破性进展,从而为规模化工程应用奠定技术基础。 机械 2024年07月16日 1 点赞 0 评论 356 浏览
低温共烧陶瓷的增材制造技术综述 摘要:低温共烧陶瓷(Low Temperature Co-fired Ceramics, LTCC)具有优异的介电性能、热稳定性和多功能集成能力,在5G/6G 通信、毫米波雷达、卫星载荷、系统级封装等领域得到广泛应用。然而,传统工艺存在两方面显著局限:一是受成型方式制约,难以实现曲面多层基板的高精度制造;二是工艺流程复杂且对批次规模依赖性强,难以满足单件、小批基板的快速验证需求。增材制造基于逐层堆叠、按需沉积的独特技术路径,为突破上述瓶颈提供了创新性解决方案。文中系统综述了LTCC 增材制造所涉及的材料制备、成型工艺方面的研究动态,分析了当前存在的关键问题,并展望了未来发展方向。 机械 2026年04月24日 1 点赞 0 评论 100 浏览
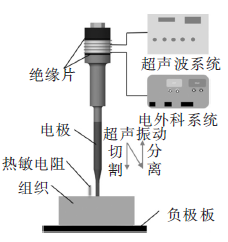
超声加工的技术发展与行业应用 摘要:超声加工技术因其众多良好的加工效果,得到了广泛的重视和良好的发展,形成了特有的行业体系。系统介绍了超声加工技术在机械制造、生物医学制造、微纳制造行业的发展应用,从加工模式、装备、应用方面重点介绍了超声加工的标志性进展,最后对超声加工技术的发展现状和发展趋势进行了总结与展望。 机械 2024年07月16日 1 点赞 0 评论 211 浏览
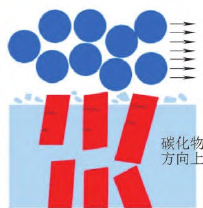
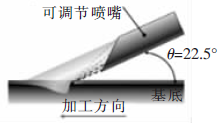
增材制件内流道精整加工技术研究进展 摘要:金属增材制造技术在航空航天领域具有复杂内流道的构件成形上具有广阔的应用前景,然而具有复杂内流道的增材制件的精整加工是工业应用的瓶颈问题。分析了内流道机械抛光技术、化学与电化学抛光技术、电解质等离子抛光技术的加工原理、关键技术及国内外研究进展。针对增材制件内流道精整加工需求,分别研究了机械抛光技术、化学与电化学抛光技术、电解质等离子抛光技术的适应性问题及探索方向。针对增材制件内流道精整加工关键技术发展趋势提出了展望:①研究针对功能梯度材料、多金属材料的增材制件内流道精整加工技术;②研究针对具有复杂几何形状、内部复杂分叉、渐变毛细结构、拓扑结构等复杂内流道的复合精整加工技术或组合加工技术;③研究针对内流道精整加工质量的高精度检测方法和几何误差的三维重构技术。 机械 2024年09月30日 1 点赞 0 评论 381 浏览
超高速激光熔覆的研究现状与展望 摘要:超高速激光熔覆技术是近年发展起来的一种表面改性技术,因其稀释率低、热影响区小、效率高等特点,受到国内外学者的青睐。文章介绍了几种常见表面改性技术并进行比较,从粉末材料、工艺参数、组织性能三方面分析了超高速激光熔覆的研究现状,讨论了传统激光熔覆涂层与超高速激光熔覆涂层微观组织及性能的差异,总结了超高速激光熔覆技术的应用实践,综述了超高速激光熔覆技术目前存在的问题,并对其发展趋势进行展望。 机械 2026年03月04日 1 点赞 0 评论 145 浏览
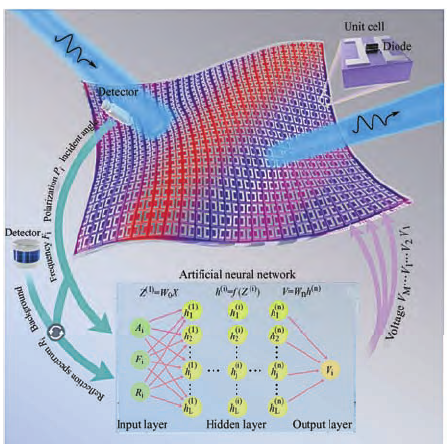
智能表面工程 摘要:表面工程自其诞生以来,经历了从传统表面工程向复合表面工程、纳米表面工程及表面工程自动化的发展,正在信息技术、生物技术、纳米科技等前沿领域中萌生。随着智能时代的来临,智能表面工程应运而生。智能表面工程是对摩擦表面赋予智能调控性能,使之具有自感知、自适应、自愈合能力,从而实现摩擦学行为的智能控制。介绍皮肤自感知、关节自感知、消化道自适应和表皮自愈合等人体表面智能性,触屏自感知表面、损伤自感知表面、摩擦自感知表面和触压自感知表面等自感知表面创新,自适应表面变色、自适应调光涂层、自适应疏水涂层、自清洁除尘表面、自适应隐身表面、自硬化耐磨表面和自减摩超滑表面等自适应表面创新,植物自愈合、自愈合聚合物膜、自愈合导电皮肤、自愈合离子皮肤、自修复防腐涂层、自愈合蛋白质体、自愈合关节软骨和自愈合磨损划痕等自愈合表面创新。以往的表面工程是对材料表面强化以提高其物理、化学、力学性能的技术和方法,而智能表面工程则是赋予材料表面自润滑、自抗磨、自耐蚀、自修复等功能的智能表面技术和方法。未来的智能装备离不开摩擦智能,摩擦智能必须有智能表面。智能表面制造须要深入研究仿生科学与表面工程技术交叉融合,因此在摩擦学、仿生学、低碳学等领域尚有许多需要探索的关键理论和技术问题,一旦取得突破,将促进智能表面工程领域的显著进步。可以预见,摩擦智能表面工程将支撑智能装备制造技术的发展,创造出更快、更强、更稳的机械系统;仿生智能表面工程将使机器人更智能地实现对自身运动的感觉、对空间的感知和对外部刺激的反应;低碳智能表面工程将降低摩擦系统能耗、减少建筑领域碳排放,从而使摩擦学及表面工程研究与人类命运共同体紧密结合在一起。 机械 2024年11月26日 1 点赞 0 评论 638 浏览
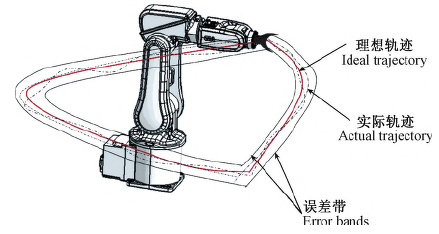
六自由度工业机器人运动可靠性分析 摘要:为评估六自由度工业机器人末端执行器在任务空间中作业的可靠性与精确性,提出了一种基于包络法的机器人运动可靠性分析策略。首先,通过运动学获得机器人系统的误差函数及可靠性模型。其次,采用包络法求解可靠性模型获得末端执行器的失效概率,并通过泰勒公式对误差函数进行线性化处理,同时,在计算过程中排除协方差矩阵中的冗余点,使其符合正定条件,提高包络线的准确性。最后,对所提方法进行了仿真分析,结果表明,包络法相对于蒙特卡洛法的误差为0.5%~19.8%,验证了该方法的有效性。 机械 2025年01月20日 1 点赞 0 评论 290 浏览
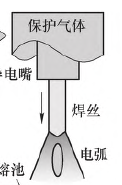
冷金属过渡技术在异质连接及增材制造中的应用 摘要:冷金属过渡(CMT)技术是在传统MIG/MAG焊基础上开发的一种改进型熔化极气体保护焊,具有热输入低、飞溅小、成形美观、绿色高可靠等一系列优点,广泛应用于航空航天、海工装备、车辆工程等领域。概括了冷金属过渡技术的原理及特点,重点介绍了冷金属过渡技术在异种金属焊接、薄板焊接、增材制造等的研究应用,以及目前存在的一些问题及未来需要研究的重点和方向。 机械 2026年05月26日 1 点赞 0 评论 87 浏览