智能播种机器人结构设计与试验
郭晓琦,李昕光,王登泽,张振坤,赵子健,郭青朋(青岛理工大学机械与汽车工程学院)
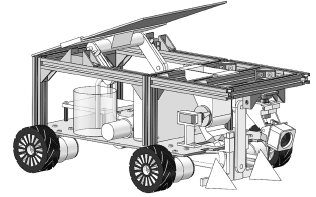
摘要:针对当前黄河流域治沙绿化中地形复杂、人工种植效果差、大型设备能源结构不合理等问题,设计了一种集图像传输、远程控制和光伏发电系统等功能于一体的智能播种机器人。首先进行了播种机器人的总体方案设计;然后根据播种机器人的工作区域特点对关键零部件进行了计算和选型,利用Solidworks软件对各零件进行建模及装配,并应用Simulation软件对关键零部件进行了静应力分析和模态分析;最后对该播种机器人进行样机制作,播种试验结果表明装置的播种合格率达到86.08%。此播种机器人的推广可以降低劳动者的工作强度,对提高农业生产的智能化具有重要意义。
关键词:黄河流域;播种机器人;结构设计;仿真分析
目录介绍
0 引言
1 总体设计方案及工作原理
2 关键零部件设计
2.1 播种装置的设计
2.2 升降装置的设计
2.3 运行装置的设计
2.3.1 结构组成及工作原理
2.3.2 运行装置功率计算
(1)直线运行工况
(2)爬坡运行工况
2.4 电源装置的设计
2.5 光伏发电装置的设计
3 控制系统设计
4 有限元分析
4.1 静应力分析
4.2 模态分析
5 样机实现
5.1 样机制作
5.2 APP交互界面
5.3 播种性能测试
5.4 试验结果与分析
6 结论
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!






发表评论 取消回复