搅拌摩擦增材制造技术及应用
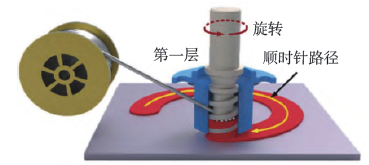
摘要:增材制造技术作为第四次工业革命的重要组成部分,近年来受到广泛关注。搅拌摩擦增材制造(Friction stir additive manufacturing, FSAM)是一种衍生于搅拌摩擦焊的新型固相增材制造技术,具有无凝固缺陷、晶粒细小、残余应力小等优点,为铝合金、镁合金等轻质合金构件的高性能快速制备提供新途径。该文以实现FSAM 的工业化应用为出发点, 着重介绍了FSAM 技术的原理和特点,综述了铝合金增材构件的微观结构和力学行为的研究进展,并归纳了其拓展应用的发展现状。最后,展望了FSAM 技术的未来研究方向,为该技术的发展应用提供有益参考。