大尺度复杂构件群体机器人协同并行制造系统集成的关键技术
王哲1,2,丰飞2,郭峰2(1.大连理工大学;2.上海铨朴科技有限公司)
摘要:以航空、航天、航海及轨道交通等领域大尺度复杂构件的高效、高质量加工需求为导向,探究基于群体机器人集群化并行制造系统的大构件多移动机器人协同制造系统的关键技术。围绕典型大尺度构件的加工工艺需求,基于移动测量机器人、移动加工机器人和移动装配机器人等多种类、多形式移动机器人的设计和研制,提出基于多移动机器人协同并行制造方案、大构件机器人化加工机器人本体设计方案、多模态协作机器人感知与测量方案、多机器人协同的加工机器人本体控制器及群体加工机器人系统控制方案。阐述多群体机器人移动加工的机器人控制策略与方案,针对加工机器人群体协同并行加工方法、大构件测量与群体机器人协同控制等关键技术,不但从本体研发、控制器等方面探究了国产工业机器人性能提升与优化的方法,也力图为后续航空航天等领域的大构件加工拓展工作思路。
关键词:大尺度构件;自主移动机器人;群体机器人;自主控制;多机器人协同并行制造
目录介绍
1 大构件群体机器人协同并行制造
1.1 航空航天等大尺度构件的典型类别
1.2 大尺度构件群体机器人协同并行制造模式
2 大尺度构件群体机器人协同并行制造系统的关键技术
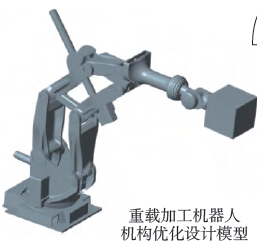
2.1 大构件加工机器人本体构型与机构创新设计
(1)大工作空间
(2)高刚度、高精度
(3)大负载
(4)轻量化本体结构
(5)同步优化负载自重比
2.2 “蚂蚁啃骨头”式吸附加工机器人本体设计
2.3 超冗余多自由度宏微机器人系统
2.4 基于移动测量的大尺度构件原位测量与三维重构方法
2.5 基于多传感器信息融合的加工机器人高精度末端轨迹跟踪与控制
3 大尺度构件群体机器人的自治——协同控制系统
3.1 移动制造机器人控制器硬件架构
3.2 群体机器人协同并行制造控制系统
(1)加工工艺规划模块
(2)基于数字孪生加工过程监控与实时动态优化模块
(3)环境感知、测量与三维重构系统模块
(4)全体机器人系统并行制造控制系统(Robotic machining operatingsystem,RMOS)模块
(5)群体机器人协同制造机器人子系统模块
4 大尺度构件群体机器人协同并行制造系统关键技术及展望
5 结论
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!






发表评论 取消回复