非侵入式脑机接口在机器人控制领域的研究综述
高晗1,蒲琪然1,赵永生1,张茂林2,吴紫涧1,程宝平1,王柏村2(1.中移(杭州)信息技术有限公司;2.浙江大学机械工程学院)
摘要:非侵入式脑机接口(Brain-computer interface, BCI)技术作为一种新兴的人机交互方式,在机器人控制领域展现了广阔的应用前景。首先概述其发展背景与重要性,并深入探讨脑电信号的生理基础,阐明脑电图(Electroencephalography, EEG)以其无创性和便捷性成为BCI系统的常用测量手段。随后,分析了典型BCI 范式的优劣特点和适用场景——包括主动式如运动想象、反应式如稳态视觉诱发电位(Steady-state visual evoked potential, SSVEP)、事件相关电位P300,以及结合多种范式优势的混合范式,展示了这些范式如何实现复杂且高效的机器人控制任务。此外,系统地介绍了EEG 信号采集、预处理及模式识别的关键步骤,强调了深度学习在提高解码精度方面的作用,同时也指出了其面临的挑战,如数据量需求大和模型解释性差。最后,总结了BCI 技术的发展趋势和研究挑战,提出了推动非侵入式BCI 技术在实际机器人控制应用中进一步发展的方向。综上所述,不仅对非侵入式BCI 技术在机器人控制领域应用进行了探讨,还强调了该技术在未来可能带来的变革性影响,为后续研究提供参考和启发。
关键词:脑机接口;机器人控制;运动想象;稳态视觉诱发电位;模式识别
目录介绍
0 前言
1 EEG的生理基础
2 BRI脑电范式设计
2.1 主动式脑电范式
2.2 反应式脑电范式
2.2.1 SSVEP 范式
2.2.2 P300 范式
2.3 混合范式
3 脑电分析方法
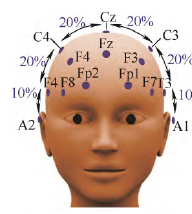
3.1 信号采集
3.2 信号预处理
3.3 特征提取
(1) 时域特征
(2) 频域特征
(3) 时频特征
(4) 空间特征
3.4 模式识别
3.4.1 机器学习方法
3.4.2 深度学习方法
(1) 卷积神经网络
(2) 循环神经网络
(3) Transformer
4 未来发展趋势与挑战
(1) 信号采集技术的革新
(2) 脑电分析与实时解码性能优化
(3) 脑电信号的神经机理研究
(4) 智能机器人控制前沿技术
(5) 多领域技术的协同发展
(6) 安全性和伦理问题
5 结论
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!






发表评论 取消回复