面向光学元件磨削加工的机器人力控系统研究
林子琦,王振忠,陈熠,徐晓雨(厦门大学航空航天学院)
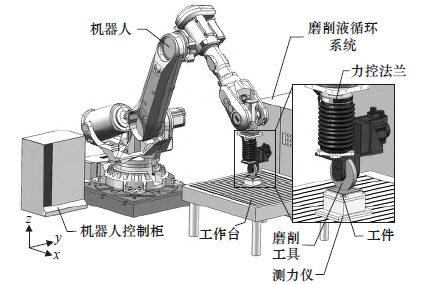
摘要:随着自由曲面光学元件加工需求日益增长,能短周期高柔性智能化成线的超精密磨削、抛光设备及工艺成为光学元件批量生产的关键。传统超精密磨削机床设计周期长、制造及投入成本高,难以满足中小批量定制的多样化市场应用。基于大工作空间、低成本且智能化、柔性化的六轴工业机器人,提出了机器人主动柔顺力控磨削方法,探究机器人力控磨削作业的运动控制,研究力控法兰特性从而掌握力控控制策略;基于力控磨削工艺实验求解建立稳定磨削力模型,实现通过控制力控期望力来实现机器人恒定磨削深度,粗磨阶段有效提升工件面形质量,相较于机器人无力控磨削,机器人力控磨削峰谷值(peak-to-valley,PV)提升了57.8%,均方根值(root mean square, RMS)提升了63.5%。
关键词:工业机器人;力控磨削;磨削加工;机器人磨削;光学加工
目录介绍
1 机器人力控磨削运动控制
1.1 机器人运动控制
1.2 力控控制原理
1.3 力控磨削联动控制
2 力控法兰系统运动特性
2.1 力控法兰特性测试平台搭建
2.2 阶跃力跟踪实验
2.3 恒力跟踪实验
3 机器人力控恒定磨削深度控制
3.1 磨削力建模原理及方案设计
3.2 力控磨削力监测实验系统
3.4 力控恒定磨削深度验证
3.5 力控影响实验
4 结语
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!






发表评论 取消回复