超声引导便携式脉管穿刺机器人
孙百强1,2,3,4,王重阳1,林鹏1,赫冠男5,姜振明5,毕建斌5,刘浩1,4(1 中国科学院沈阳自动化研究所机器人学国家重点实验室;2 中国科学院机器人与智能制造创新研究院;3 中国科学院大学;4 辽宁省微创手术机器人重点实验室;5 中国医科大学)
摘要:脉管穿刺介入手术是对目标脉管进行穿刺后插入导丝,精确到达患处进行治疗的一种现代微创治疗方式,具有创伤小、恢复快、安全性高等特点。但由于脉管的深度不同,如何对目标脉管进行定位并精准穿刺是穿刺介入手术的一个难点。目前的穿刺设备由于体积和重量原因并不适用于非临床条件下紧急建立脉管通路使用。为此,设计一种超声引导的便携式脉管穿刺机器人,该机器人通过超声设备观测脉管,利用机械结构将超声图像、穿刺针和目标脉管对准,再通过调节上下移动距离,实现对不同深度脉管的精准穿刺。该机器人体积小、重量轻,可以在非临床条件下便携使用。实验表明,相较于常规的穿刺方法,该机器人可减少患者的创伤,减轻操作者的操作难度,提高脉管穿刺的成功率。
关键词:微创手术;脉管穿刺;超声引导;便携式手术机器人
目录介绍
1 超声引导脉管穿刺的过程和参数
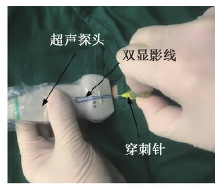
1. 1 超声引导脉管穿刺过程
1. 2 脉管穿刺的参数设计
2 机器人设计
2. 1 机械设计
2. 2 使用方法及穿刺原理
2. 3 穿刺力感设计
3 实验验证
4 结果及讨论
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!







发表评论 取消回复