基于肌肉协同特征的康复机器人辅助踏步运动关节角度估计
冯永飞1,2,杨圣业1,王琦3,卢衍正3,田俊杰2,王洪波2, 3,牛建业3(1.宁波大学机械工程与力学学院;2.复旦大学工程与应用技术研究院;3.燕山大学机械工程学院)
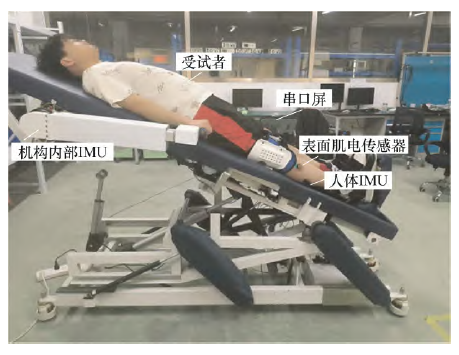
摘要:针对脑卒中患者肢体与康复机器人交互协同性差和动作不自然的问题,提出一种基于肌肉协同特征(Temporal-spatial muscle synergy feature,TSMS)、双向长短期记忆网络(Bi-directional long short-term memory, BiLSTM)与注意力机制(Attention)四肢多关节角度连续估计算法(TSMS-BiLSTM-Attention)。设计制作床上四肢协同康复机器人,并建立康复机器人上肢和下肢模块的运动学模型。采集人体踏步运动的上肢和下肢表明肌电信号(Surface lectromyography,sEMG)和惯性传感器信号(Inertial measuring unit,IMU)。利用非负矩阵分解提取人体踏步运动中的静态肌肉协同特征,并确定4 种肌肉协同模式。提出肌肉协同特征的TSMS-BiLSTM-Attention关节角度估计模型,用以估计运动中的四肢关节角度,并采用带异常值的非负矩阵分解算法对sEMG 信号实时提取肌肉协同特征。通过IMU测量的欧拉角与四肢运动学模型计算关节角度的测量值。基于TSMS-BiLSTM-Attention模型提取sEMG 信号的时空信息,建立四肢sEMG 信号与关节角度序列间的映射关系。招募了7 名受试者开展踏步运动实验,并整理、分析了相关实验数据。结果表明基于肌肉协同特征的关节角度估计表现显著优于时域、频域和时频特征,关节角度估计的决定系数分别为0.92、0.88、0.86 和0.91。对提出的踏步运动关节角度估计模型在床上四肢康复机器人上进行验证,在主动康复训练中,髋关节、膝关节、肩关节、肘关节在线回归的均方根误差分别为3.56°、2.11°、2.36°和3.39°,相对分析误差分别为5.63°、10.13°、7.92°和7.24°。
关键词:康复机器人;肢体康复;表面肌电信号;肌肉协同;关节角度估计
目录介绍
0 前言
1 床上四肢协同康复机器人
1.1 机构设计
1.2 运动学分析
2 人体踏步运动姿态测量
2.1 踏步实验与信号采集
2.2 信号处理
2.3 基于NMF算法的肌肉协同特征
3 基于肌肉协同的关节角度估计模型
3.1 sEMG信号特征提取
3.2 关节角度估计结果
4 关节角度估计实验
5 结论
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!







发表评论 取消回复