玻璃体视网膜显微手术机器人研究进展及前沿热点
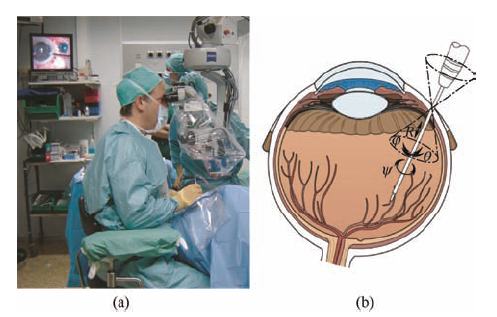
摘要:由于眼组织精细、脆弱,眼球体积较小等原因,传统玻璃体视网膜手术难度大、风险高。机器人技术的引入,克服了传统手术稳定性差、精度低的弊病,提升手术安全性与可靠性。根据操作方式不同,从机器人构型、操作方式等方面分类介绍玻璃体视网膜显微手术机器人的研究进展。
关键词:眼科手术机器人;玻璃体视网膜手术;生物力学建模;多模信息辅助;视觉引导;多臂协作;共享控制
目录介绍
0 前言
1 研究进展
1.1 协同式操作机器人
1.2 主从式操作机器人
1.3 手持式操作机器人
2 设计要求及共性技术
2.1 典型玻璃体视网膜手术流程
2.2 机器人设计要求
2.3 共性技术
3 前沿研究热点
3.1 眼组织生物力学建模
3.2 术中多模态信息融合辅助技术
3.3 显微影像与OCT引导技术
3.4 多臂协作控制技术
3.5 共享控制技术
4 结论
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!







发表评论 取消回复