基于工业机器人的复杂曲面磨抛关键技术综述
邓建新1,2袁邦颐1,2黄秋林1,2丁度坤1,3辛曼玉3,4刘光明1,2 (1.广西大学广西制造系统与先进制造技术重点实验室;2.广西大学;3.东莞职业技术学院;4.广东汇兴精工智造股份有限公司)
摘要:磨抛加工是提升零件表面质量和精度的重要方法之一。基于工业机器人系统的复杂曲面磨抛技术正逐渐成熟,凭借灵活、占地小、精度高、成本低等优势正逐渐取代人工磨抛和数控机床磨抛成为主流。通过分析基于工业机器人的磨抛加工原理,引出影响机器人磨抛加工精度效果的关键问题:磨抛加工轨迹的规划精度和力控制精度,前者关注加工效率和精度之间的平衡,后者则更侧重于加工的精度和一致性;从这两个方面出发,总结机器人磨抛系统加工轨迹规划方法和柔顺力控制策略的研究目的、特点和成果进展。机器人磨抛系统加工轨迹规划以应用与改进传统数控机床磨抛中常用的加工路径规划方法为主,出现了少量根据机器人特性提出的加工路径规划方法;磨抛柔顺力控制技术出现了被动柔顺、主动(阻抗控制、力/位混合控制)及智能控制等策略,对比分析了各方法原理、研究应用情况和优劣;并提出了未来可能的发展方向。为该领域的研究者提供指引。
关键词:磨抛加工;磨抛机器人;加工路径规划;柔顺力控制;主被动柔顺;智能控制
目录介绍
0 前言
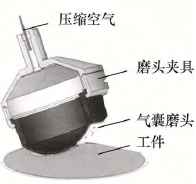
1 基于工业机器人的磨抛加工原理
2 复杂曲面磨抛路径规划研究现状
2.1 复杂曲面的表示方法
2.2 工业机器人磨抛加工路径规划
3 机器人磨抛柔顺力控制方法现状
3.1 被动柔顺力控制研究
3.2 主动控制策略
3.2.1 阻抗控制策略
(1) 自适应阻抗控制方法
(2) 基于智能算法的阻抗控制方法
3.2.2 力/位混合控制策略
(1) 一般力/位混合控制方法
(2) 基于智能算法的力/位混合控制方法
3.2.3 智能控制策略
3.3 主-被动柔顺相结合的柔顺控制
4 结论及展望
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!






发表评论 取消回复