六自由度工业机器人运动可靠性分析
李子依1,丁力1,马瑞1,段晋军2 (1.江苏理工学院机械工程学院;2.南京航空航天大学机电学院)
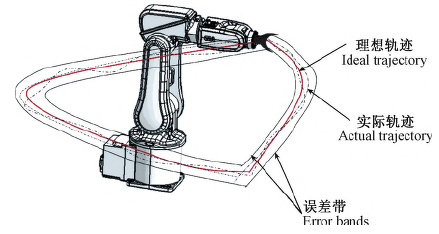
摘要:为评估六自由度工业机器人末端执行器在任务空间中作业的可靠性与精确性,提出了一种基于包络法的机器人运动可靠性分析策略。首先,通过运动学获得机器人系统的误差函数及可靠性模型。其次,采用包络法求解可靠性模型获得末端执行器的失效概率,并通过泰勒公式对误差函数进行线性化处理,同时,在计算过程中排除协方差矩阵中的冗余点,使其符合正定条件,提高包络线的准确性。最后,对所提方法进行了仿真分析,结果表明,包络法相对于蒙特卡洛法的误差为0.5%~19.8%,验证了该方法的有效性。
关键词:工业机器人 运动可靠性 包络法 正态分布
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!






发表评论 取消回复