石墨烯气凝胶全柔性触觉传感器的设计、组装及性能
王保民,李义云,陈天弟,汪秉吉,刘雨富,马立民,杨生荣,高欣,王金清
摘要:针对柔性触觉传感器存在的设计难度大、抗干扰性差、不易封装以及线路布置困难等问题, 基于Storakers材料模型的应变能密度函数发展了一种基于石墨烯气凝胶(graphene aerogel, GA)的具有“气泡膜”结构的全柔性触觉传感器的设计方法. 通过模拟分析发现, 相对于“三明治”结构, “气泡膜”结构的GA柔性触觉传感器具有更好的抗干扰性. 在此基础上, 设计并组装了“气泡膜”结构的GA全柔性触觉传感器, 通过实验证实该GA全柔性触觉传感器具有优异的传感特性、力学特性和抗干扰特性. 同时, 设计开发了压阻式传感阵列的信号采集系统, 并成功实现了其对力的大小、物体位置和形状等信息的实时采集和传感监测.
关键词:石墨烯气凝胶, 全柔性触觉传感器, 气泡膜结构, 数值模拟, 传感应用
目录介绍
1 引言
2 GA力学建模与柔性传感器结构分析
2.1 GA力学建模
2.2 “气泡膜”结构抗干扰性能分析
3 GA全柔性触觉传感器设计与制作
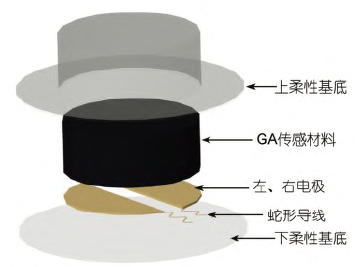
3.1 传感器结构设计及其阵列化
3.2 GA全柔性触觉传感器制作
4 结果与讨论
4.1 传感器力学和传感性能分析
4.2 传感器阵列抗干扰性试验分析
4.3 传感器阵列感知性能试验分析
5 结论
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!






发表评论 取消回复