球形钛合金粉末制备技术及航空增材制造应用研究进展
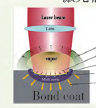
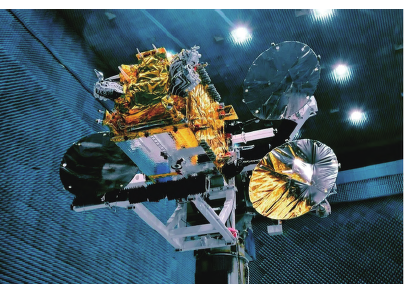
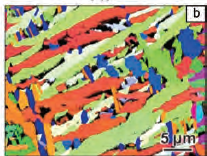
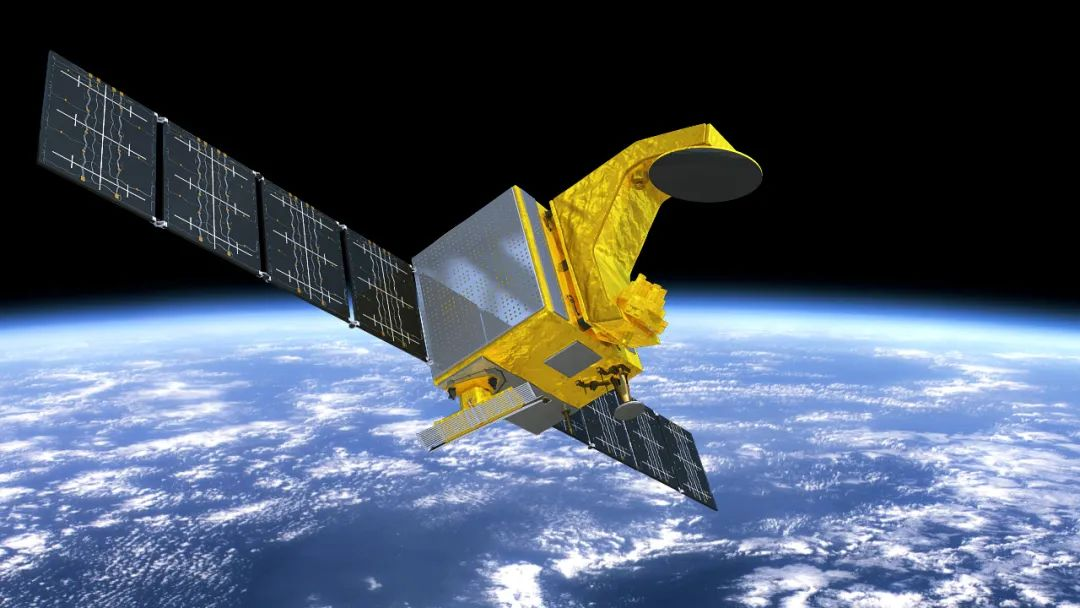
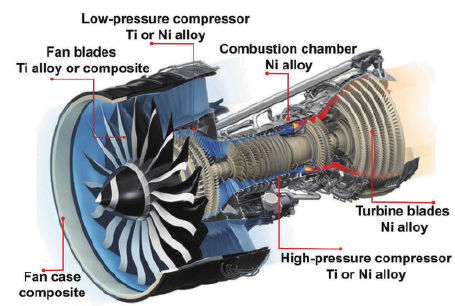
摘要:钛合金具有高强轻质耐高温的特点,因而成为拥有巨大前景的航空结构材料。传统的机械制造工艺难度大、成本高,限制了钛合金的应用。增材制造(AM)作为新兴的先进制造技术,可以通过逐层加工的方式制造出具有较高三维精度的金属部件,从而实现钛合金的近净形加工。因此,首先介绍了球形钛合金粉末制备技术,其中包括等离子旋转电极雾化法(PREP)、电极感应气体雾化法(EIGA)、等离子体雾化(PA)和等离子球化技术(PS)等,对比4 种球形钛合金粉末的制备技术和优缺点,以及在航空增材制造的应用,包括激光选区熔化(SLM)、电子束选区熔化(EBSM)和激光熔化沉积(LMD)等,总结了不同钛合金粉末制备技术在航空增材制造的应用特点和发展趋势,并指出钛合金增材制造未来发展的关键是低间隙钛粉的制备,增材制造设备高精度、高效率和大型化将是未来的发展趋势。