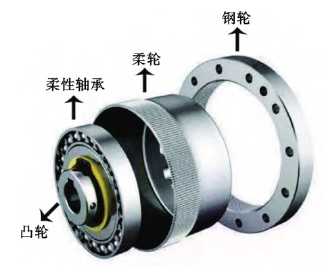
机器人谐波减速机柔性轴承用钢的超高旋转弯曲疲劳强度的研究
摘要:采用电弧炉生产工艺,控制废钢/铁水比为80%以上,开发出长寿命机器人谐波减速机柔性轴承用钢,从非金属夹杂物、奥氏体晶粒度、碳化物带状组织方面对比柔性轴承用和传统滚动轴承用钢的冶金质量,并利用旋转弯曲疲劳试验的方法测试柔性轴承用和传统滚动轴承用钢在107循环周次条件下的疲劳强度。机器人谐波减速机柔性轴承用钢的w[O]<0.0004%,w[Ti]<0.001%,A类硫化物类非金属夹杂物≤1.0级,B类和D类氧化物类非金属夹杂物≤0.5级,极值统计法预测最大球状夹杂物的尺寸<30μm,检验结果表明柔性轴承用钢具备超高纯净度。通过在冶炼过程增加Al和N的元素含量,柔性轴承用钢具有10级的奥氏体晶粒度,远高于传统滚动轴承用钢的8.5级晶粒度。通过延长高温扩散时间,7.1和7.2级别的碳化物带状组织占比要高于传统滚动轴承用钢,超高晶粒度和碳化物带状组织的带宽减小表明柔性轴承用钢具备超高组织均匀性。柔性轴承用钢在107循环周次条件下具有超高旋转弯曲疲劳强度为1016 MPa,疲劳寿命略高于传统滚动轴承用钢。