焊接机器人焊缝跟踪方法及路径规划研究
曹学鹏1,脱帅华1,2,张弓2,吴月玉2,张雨航1,2,樊豪1,赵睿英1,冯艳丽3 (1.长安大学工程机械学院;2.广州先进技术研究所;3.西安航天时代精密机电有限公司)
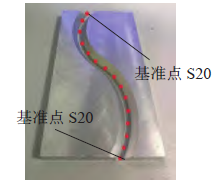
摘要:焊缝自主跟踪是机器人焊接智能化的关键,其精度是评价焊接质量的重要指标。焊接对象或条件的改变对精度的影响最为直接,尤其当焊件表面存在缺陷时会产生较大的跟踪误差。为此,开展焊接机器人焊缝跟踪方法及路径规划研究,提出焊缝跟踪的4步法:1)利用激光传感器扫描坡口,获取轮廓数据。2)接着通过组合滤波算法,运用限幅滤波和高斯滤波处理数据以平滑噪声。3)采用导数法初步定位特征点,通过寻找第1阶和第2导数极值点以定位第1类和第2类特征点;以初步定位获得的特征点为分界点,分段拟合坡口轮廓数据,计算各拟合线段的交点进而得到精确定位的特征点。4)通过传感器位姿标定,确定其相对末端坐标系的位置,借助转换矩阵将传感器检测到的焊缝特征点转化到基座标系下,得到机器人的空间定位点;运用3次样条插值法生成焊枪末端轨迹,并驱动机器人按照预定轨迹运行,进而实现焊缝的有效跟踪。通过实验验证直线与曲线焊缝的跟踪效果,结果表明:初步定位时,跟踪误差约为0.628 mm、0.736 mm,经精确定位后,误差降为0.387 mm、0.429 mm,提升幅度分别超过38.4%、41.7%;且焊枪的抖动现象得到减弱,达到自动焊接误差≤0.5 mm的精度要求,表明了文中所提出跟踪方法的有效性,可为焊缝的高精度跟踪和自动焊接研究提供有益参考。
关键词:焊接机器人;激光测量;特征点提取;焊缝跟踪
目录介绍
1 焊缝跟踪方法
1.1 焊件扫描与数据滤波
1.2 特征点提取
1.2.1 特征点定义
1.2.2 特征点定位
1.3 焊接路径规划
1.3.1 标定激光传感器
1.3.2 确定焊接路径中间点
2 实验研究
2.1 特征点定位结果
2.2 路径规划结果
2.3 焊缝跟踪
3 结论
©软件著作权归作者所有。本站所有文件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处!






发表评论 取消回复