面向大型钢结构的机器人智能焊接方法研究 摘要:本研究针对大型钢结构制造中焊缝形状复杂、人工识别效率低、焊接路径优化困难等问题,提出了一种基于激光雷达点云的智能焊接方法。该方法通过激光雷达获取三维点云数据,结合随机样本一致性算法进行点云分割和焊缝特征提取,并利用改进的遗传算法优化焊接轨迹。实验结果表明,该方法在焊缝识别准确性和路径优化效果方面具有显著优势,为大型钢结构的智能焊接提供了一种有效的解决方案。 机械 2026年04月10日 1 点赞 0 评论 86 浏览
重型热挤压工艺与装备技术综述 摘要: 重型挤压成形的三向压应力状态, 使其在大规格难变形金属成形同步改性上具有独特的技术优势, 决定着重型挤压产业的竞争力, 是世界强国博弈的重要科技领域。从大规格、高性能难变形金属制件改性成形机理出发, 归纳总结了国内3. 6 万吨垂直挤压机立项以来重型挤压工艺与重型挤压装备技术进展, 包括重型挤压成形工艺技术、低塑性金属挤压成形工艺技术、重型挤压装备技术、典型产品开发与应用等, 分析了各技术现状和需要继续研究的方向, 旨在为关键领域核心制件的极端成形制造自主可控提供技术支撑。 机械 2026年01月27日 1 点赞 0 评论 131 浏览
面向人本智造的人体运动数字孪生研究与应用进展 摘要:在工业4.0迈向工业5.0的过程中,以人为本的智能制造(人本智造)是智能制造的创新发展范式,旨在以人的福祉为核心价值,重塑人在生产制造过程中的主体地位,推进未来工业迈向以人为本、可持续性、韧性。对人体运动行为进行分析,是理解人的运动意图,推动人本智造创新发展的关键。以面向人本智造的人体运动数字孪生研究为切入点,梳理人体运动建模、人体运动感知、人体运动分析等使能技术及其研究进展。重点围绕单元级、产线级、车间级三个维度,讨论人体运动数字孪生在人本智造领域的典型应用。最后,对面向人本智造的人体运动数字孪生进行展望。 机械 2026年03月13日 1 点赞 0 评论 127 浏览
电子束粉末床熔融增材制造装备和工艺研究进展 摘要:电子束粉末床熔融增材制造技术具有功率大、能量利用率高、扫描速度快、成形应力低、真空环境成形等突出特点,是国内外竞相发展和应用的金属增材制造技术之一。近年来,国内外在电子束粉末床熔融增材制造装备和工艺方面取得多项突破性进展,长期困扰该技术创新发展应用的成形尺寸小和电子枪阴极寿命短等问题已经得到了有效解决,并且涌现出多种新成形工艺和成形质量在线监控技术,在高熔点、高反射率、脆性难加工金属材料复杂构件增材制造方面展现出更加广阔的应用前景。本文从装备发展、在线监控和成形工艺三个方面,对国内外近年来电子束粉末床熔融增材制造技术的新进展进行了综述,并对其发展趋势、面临的技术挑战和应用前景进行了分析和展望。 机械 2026年03月05日 1 点赞 0 评论 110 浏览
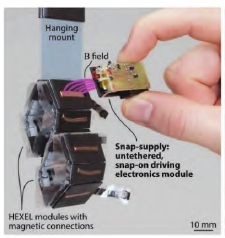
机器人物质:融合材料与智能的未来路径 摘要:受制于静态结构与固定响应模式等因素,传统智能材料的自适应调控与学习优化能力有限,无法应对复杂环境与动态需求。而当机器人技术的微型化、廉价化、智能化发展与集群技术突破相结合后,便催生了全新的智能材料理念——机器人物质,即以机器人个体为基本单元,依托自组织集群技术实现材料功能。通过整合环境感知、信息处理、耦合连接、力学性能、多态转换、能源续航与人—材交互七大基础功能模块,机器人物质具备自主决策、环境适应、可编程性、多功能性等智能特性。通过进一步与生物功能材料、适应性演化策略等技术相融合,机器人物质或将突破传统智能材料局限,在智能制造、精准医疗及极端环境探索中催生颠覆性应用。 机械 2026年02月28日 1 点赞 0 评论 78 浏览
硬质合金刀具增材制造技术发展趋势和展望 摘要:综述了增材制造硬质合金刀具的两类技术路线:基于热成形的粉末床熔融技术路线和基于生坯冷打印、脱脂和烧结工艺的冷沉积烧结技术路线。粉末床熔融技术能够制备出接近理论密度的硬质合金刀具,但存在孔隙、裂纹、脱碳以及钴蒸发等问题,通过调整激光能量密度、扫描速度和粉末特性等参数能够显著改善打印件的质量;冷沉积烧结技术能够制备出表面质量优良且力学性能优异的硬质合金刀具,但存在黏结剂残留、制件收缩等问题,通过优化黏结剂种类、脱脂工艺和烧结温度等关键参数可以提高制件的密度和力学性能。同时采用真空烧结、热压、热等静压等热处理工艺能够进一步消除材料内部缺陷,提高刀具整体性能。 机械 2026年02月11日 1 点赞 0 评论 143 浏览
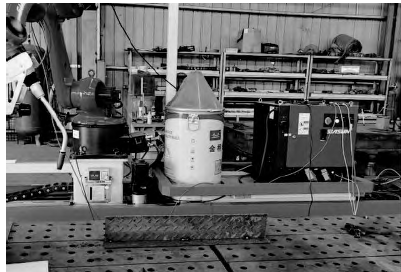
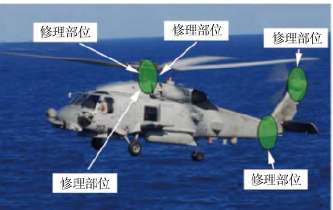
冷喷涂技术在增材修复中的应用现状与展望 摘要: 冷喷涂作为一种固态材料沉积技术,近年来成为增材制造和再制造领域热点研究和应用方向。文章介绍了冷喷涂技术的原理,总结了其主要工艺参数及对沉积层性能的影响规律,重点探讨了冷喷涂技术在航空装备、舰船装备及陆运装备领域局部损伤零部件修复方面的应用现状,围绕丰富粉末材料体系、提升沉积层性能、开发专用辅助装备以及建立健全标准体系等方面阐述了冷喷涂技术的发展前景和挑战,期待为丰富轨道交通装备的制造及修复技术手段提供有益借鉴。 机械 2026年02月05日 0 点赞 0 评论 131 浏览
压气机叶片高性能切削加工技术研究进展 摘要:新一代高推重比航空发动机对压气机叶片的抗疲劳制造技术提出了更高要求。切削加工作为叶片减材制造的重要手段,在保证叶片几何精度的同时直接影响叶片表面完整性。大量研究表明叶片表面完整性与其疲劳性能紧密相关。当前叶片的主要金属材料为轻质高强的钛合金和高温合金,但由于钛合金和高温合金是典型的受力热影响显著的材料,加之切削加工过程中存在十分复杂的力-热能场,其耦合作用对叶片表面完整性的影响十分巨大。因此,为探明压气机叶片高性能切削加工技术的发展方向,首先分析了压气机叶片型面的发展历程和切削加工叶片疲劳失效的原因;其次,分别针对光滑表面叶片和仿生表面叶片对高性能切削加工技术的国内外研究现状进行了调研和梳理;最后,总结了叶片高性能切削加工中存在的问题,并对压气机叶片高性能切削加工研究的未来发展趋势进行了展望。为实现面向抗疲劳性能优化的航空发动机压气机叶片切削加工提供了一定的发展趋势参考。 机械 2026年03月24日 1 点赞 0 评论 95 浏览
我国电加工机床行业的发展与装备应用趋势 摘要:电加工机床是工业母机的重要组成部分,其技术及装备的发展与应用对我国制造业发展发挥积极的重要作用。基于2024 年度我国电加工机床行业重点企业的统计数据,分析了我国电加工机床行业的发展和装备应用情况, 重点介绍了2024 年电加工机床行业的总体经营情况和出口情况;通过近四年的分季度销售情况对比,分析了2024 年的市场变化与特点;通过各类电加工机床的销售量和销售额占比解析了市场需求,并展望了发展趋势。 机械 2026年02月02日 1 点赞 0 评论 110 浏览
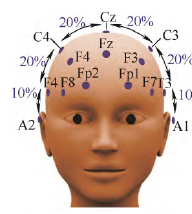
非侵入式脑机接口在机器人控制领域的研究综述 摘要:非侵入式脑机接口(Brain-computer interface, BCI)技术作为一种新兴的人机交互方式,在机器人控制领域展现了广阔的应用前景。首先概述其发展背景与重要性,并深入探讨脑电信号的生理基础,阐明脑电图(Electroencephalography, EEG)以其无创性和便捷性成为BCI系统的常用测量手段。随后,分析了典型BCI 范式的优劣特点和适用场景——包括主动式如运动想象、反应式如稳态视觉诱发电位(Steady-state visual evoked potential, SSVEP)、事件相关电位P300,以及结合多种范式优势的混合范式,展示了这些范式如何实现复杂且高效的机器人控制任务。此外,系统地介绍了EEG 信号采集、预处理及模式识别的关键步骤,强调了深度学习在提高解码精度方面的作用,同时也指出了其面临的挑战,如数据量需求大和模型解释性差。最后,总结了BCI 技术的发展趋势和研究挑战,提出了推动非侵入式BCI 技术在实际机器人控制应用中进一步发展的方向。综上所述,不仅对非侵入式BCI 技术在机器人控制领域应用进行了探讨,还强调了该技术在未来可能带来的变革性影响,为后续研究提供参考和启发。 机械 2026年03月16日 1 点赞 0 评论 158 浏览