柔性轧制及其实现方法
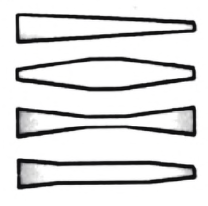
摘要:介绍了柔性轧制的概念,将柔性轧制分为几何形状尺寸的柔性调控和产品性能柔性控制两种类型,分别介绍了两类柔性轧制的实现方法和相关技术。在形状尺寸柔性调控中,利用对轧辊辊缝及孔型的灵活控制,获得具有形状尺寸优化、负载能力增强的产品,满足一些特定需求,实现节材减重、节能减排;在轧制中对组织性能进行柔性控制方面,介绍了从早期一钢多能、一钢多用,到用同一种化学成分生产不同晶粒尺寸的产品,获得不同力学性能的状况,再到近期提出的UniSteel概念,以单一化学成分取代已有的繁多汽车用钢品种;最后对柔性轧制技术的发展进行了展望。